




Нажатие клавиши <7> вызовет меню настройки меню параметров аварийной сигнализации, как показано ниже:
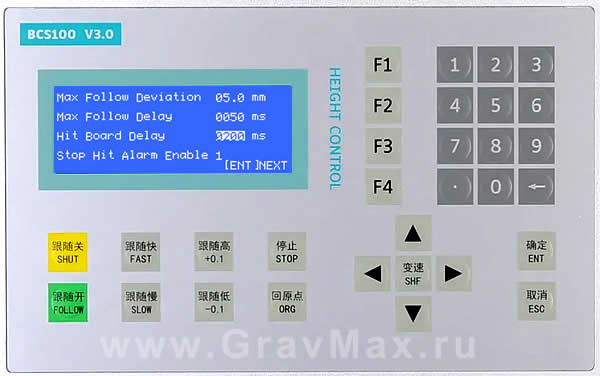
Max Follow Deviation (Макс. отклонение контроля высоты): Максимальное допустимое значение погрешности контроля высоты BCS100. После установки режущей головки на место, если погрешность превышает допустимое значение, система выдаст аварийное сообщение о выходе головки за границы листа или сильных вибрациях листа.
Max Follow Delay (Макс. задержка контроля высоты): Установка времени появления сообщения о погрешности контроля высоты. Чем больше значение, тем медленнее реакция и тем сильнее способность отфильтровывать помехи.
Hit Board Delay (Задержка сигнала контакта с листом): Когда датчик отслеживания касается поверхности листа на протяжении времени, превышающего установленный предел, датчик автоматически поднимется вверх, и появится аварийный сигнал.
Stop Hit Alarm Enable (Включить аварийную сигнализацию о столкновении при остановке): Параметр включает/выключает аварийную сигнализацию столкновения с материалом, когда датчик отслеживания остановлен. Для повышения безопасности эксплуатации рекомендуется задать значение 1. При необходимости отрегулировать центр лазера с помощью клейкой ленты или необходимости срабатывания контроллера без пластиковой пленки, значение данного параметра следует установить на 0.
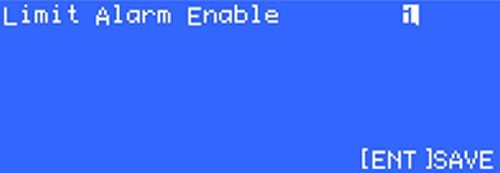
Limit Alarm Enable (Включить аварийную сигнализацию достижения пределов): Если значение параметра равно 1, будет активирована функция аварийной сигнализации о верхнем и нижнем пределе. При достижении
верхнего или нижнего предела датчик отслеживания автоматически переместится вверх, после чего будет выдан аварийный сигнал. Если параметр установлен на 0, функция аварийной сигнализации отключается.