




Нажатие клавиши <6> вызовет меню настройки параметров сети, как показано на рисунке: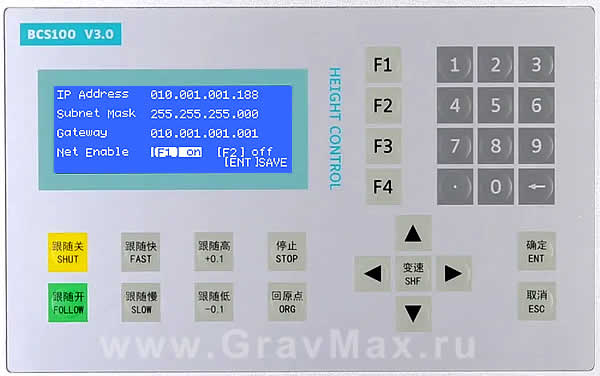
При использовании программы CypCut реализовывать такие функции, как произвольная установка высоты режущей головки, перемещение скачками, сегментированная прошивка, перенос системы координат, компенсация смещения оптики и прочие передовые функции, можно по сети. Подробная информация приведена в руководстве к программе CypCut. Если ПО CypCut не используется, отключите сетевой кабель, иначе процесс запуска станка будет слишком медленным.
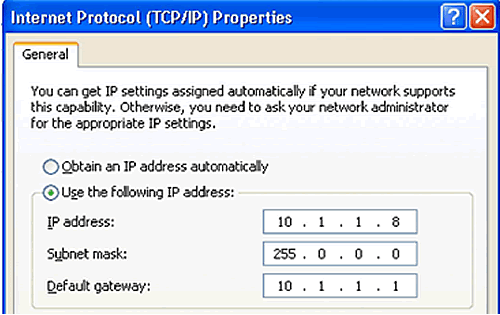
При использовании сетевых функций рекомендуется использовать прямое подключение ПК и BCS100 с помощью витой пары. IP-адрес ПК должен быть в той же подсети, что и BCS100 (10.1.1.ххх), но не должен совпадать с ним. Шлюз должен быть в том же сегменте сети, и последняя цифра должна быть 1, например, 10.1.1.1, как показано на рисунке ниже:
Примечание: Если компьютер одновременно подключается к другому сетевому оборудованию, например, оптоволоконному лазеру IPG (в режиме сетевого подключения), каждое оборудование должно быть установлено в разных сегментах сети.
Например, оборудование может, соответственно, иметь адрес 10.1.2.x и 192.168.1.x.
2. После сброса IP-адреса сетевой карты необходим перезапуск сетевой карты для вступления настроек в силу.