




Целью калибровки датчика отслеживания является измерение соотношения между емкостью и расстоянием между датчиком и листом. Нажмите клавишу <2> для перехода в меню калибровки датчика отслеживания, как показано на рисунке: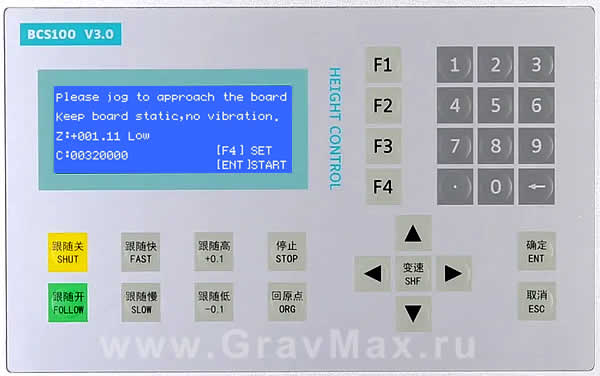
Если ранее не производилась настройка параметров, нажмите клавишу <F4> для настройки параметров калибровки.
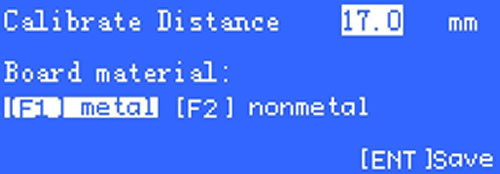
Calibrate Distance (Расстояние калибровки): Требуется для записи данных емкости, по умолчанию составляет 25 мм. Если перемещение по оси Z слишком короткое, пользователи могут соответствующим образом уменьшить значение.
Board material (Материал листа): Настройка материала отслеживаемого объекта
Для сохранения параметров и возврата в предыдущее меню необходимо нажать клавишу <ENT>.
Перед началом калибровки следует поместить датчик отслеживания на расстояние 1 мм от листа, не допуская при этом вибрации последнего. Нажатие клавиши <ENT> запустит процесс калибровки.
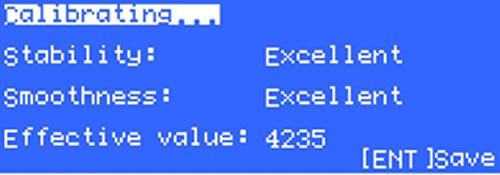
Процесс калибровки автоматически завершится через 10 секунд. Пользователь может прервать процесс калибровки нажатием клавиши <STOP>. По завершении процедуры возможны следующие уровни калибровки: «excellent» (отлично), «good» (хорошо), «not good» (удовлетворительно) и «poor» (плохо). Автоматическая калибровка включает следующие этапы:
(1) Головка медленно опускается вниз и фиксирует касание с листом.
(2) После касания с листом головка поднимается на 2 мм и останавливается.
(3) Головка медленно опускается вниз и фиксирует повторное касание с листом.
(4) оловка поднимается на расстояние в пределах диапазона калибровки, проверяя характеристики плавности и емкости.
Если один из шагов не выполнен и активирован аварийный сигнал, следует исключить возможность неполадок с соединением или оборудованием. Для проверки наличия неполадок достаточно коснуться сопла металлом и проследить изменения емкости. Если изменения незначительны (менее 200) или емкость остается равной нулю, то наличие проблем с оборудованием или емкостью доказано. Данный метод диагностики рекомендуется применять только при отключенном питании.
По результатам калибровки дается оценка следующим параметрам:
Stability (Стабильность): отражает статические характеристики емкости. Если после калибровки состояние не является идеальным, причиной может быть вибрация листа или сильные внешние помехи.
Smoothness (Плавность): отражает динамические характеристики изменения емкости во время калибровки.
Оценка данных двух параметров должна быть, как минимум, «medium» (удовлетворительно). При более низких значениях нормальная работа не гарантируется. В относительно идеальных условиях эти два параметра должны быть оценены как «excellent» (отлично), «good» (хорошо).
Effective value (Эффективное значение): отображает зависимость емкости от расстояния до листа (от 0,5 мм до бесконечности). Величина данного показателя прямо пропорциональна точности и стабильности.
После нажатия клавиши <ENT> результаты калибровки сохранятся, и будет отображен график емкости-расстояния. Обычно кривая должна быть плавной, как показано на рисунке ниже:
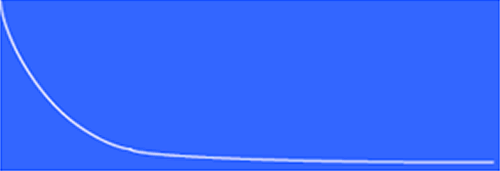
Если график представляет собой не плавную кривую, а ломаную линию с резкими падениями или прерываниями, необходима повторная калибровка.
Если повторная калибровка не принесла искомого результата, необходимо проверить оборудование на предмет ошибок в процессе установки и подключения кабелей. Повторно ознакомиться с графиком калибровки можно в основном меню, нажав клавишу <6>.
При ошибке калибровки возможно появление следующих аварийных сигналов:
Hit board over time (Превышено время ожидания касания с листом): Данное сообщение появляется, если в процессе калибровки лазерная головка перемещается вниз и в течение длительного времени не фиксирует касание с листом. Для проверки необходимо выполнить следующее: сначала убедиться, что перед калибровкой головка находится близко к листу (около 5 мм). Далее проверить состояние оборудования и правильность подключения кабелей. Затем повторно провести калибровку.
Если головка не перемещается в процессе калибровки, возможно, установлен неправильный коэффициент на выходе аналогового напряжения. Уменьшение коэффициента усиления скорости напряжения может решить проблему.
Leave board overtime (Превышено время ожидания отделения от листа): Проверьте состояние оборудования и правильность подключения кабелей.
Sample overtime (Превышено время вычисления): Необходимо заново провести калибровку.
Always hit board (Постоянный контакт с листом): См. аварийный сигнал «Превышено время ожидания отделения от листа».
Capacity changes abnormally (Аномальное изменение емкости при калибровке): Необходимо заново провести калибровку. Перед калибровкой в режиме толчкового перемещения необходимо опуститься к листу на расстояние 1-5мм