




Нажатие клавиши <F3> в главном меню вызовет меню функционального тестирования, как показано ниже:
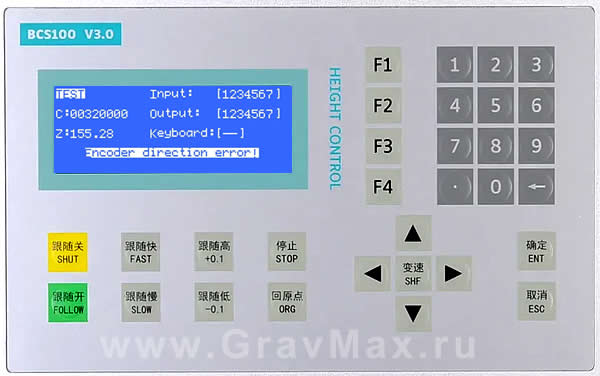
В данном меню можно проверить правильность состояния клавиш, входных и выходных портов и направления вращения двигателя. После завершения установки в первый раз необходимо перейти в меню толчкового перемещения для проверки правильности направления вращения двигателя и полярности сигнала датчика положения. Если направление вращения двигателя неверное, необходимо изменить параметры направления вращения сервопривода в «Механических параметрах», а затем провести перемещение в толчковом режиме, чтобы определить правильность полярности сигнала датчика положения. Если появится предупреждение о неправильной полярности сигнала датчика положения, необходимо изменить ее в «Механических параметрах».
Описание входных/выходных портов разъема представлено в таблице ниже:
| Вход | Определение | Выход | Определение |
| IN1 | Переход на высоту резки | OUT1 | Переход к месту |
| IN2 | Переход в среднее положение | OUT2 | Сигнал удержания позиции |
| IN3 | Подъем | OUT3 | Выходной аварийный сигнал |
| IN4 | Сигнал остановки | OUT4 | Прошивка |
| IN5 | Отрицательный предел | OUT5 | Сброс аварийного сигнала сервопривода |
| IN6 | Положительный предел | OUT6 | Сервопривод включен (сигнал сервопривода) |
| IN7 | Аварийный сигнал сервопривода (сигнал сервопривода) | OUT7 | Нулевая частота вращения (сигнал сервопривода) |